레지스터
레지스터는 기본적으로 '저장장치'입니다.
플립플롭이 1비트짜리 저장장치였다면, 레지스터는 그러한 플립플롭들을 n개 연결하여 n비트의 정보를 저장하는 저장장치라고 생각할 수 있습니다.
대부분의 레지스터에서는 "로드(Load)"신호를 병렬로 사용합니다.
로드(Load) 신호
로드는 클럭과 비슷하나, 클럭이 아무생각 없이 주기적으로 계속해서 오는 전기신호라면 로드는 다음과 같이 사용합니다.
우선 레지스터의 값이 '변경'되어야 하는 조건에 대한 회로를 만듭니다.
그리고 이 회로의 출력을 레지스터의 로드에 연결합니다.
결론적으로 레지스터의 값이 변경되어야 하는 상황에 로드의 값이 1이 됩니다.
로드는 클럭과 AND 게이트로 연결하여 로드가 1일때, 클럭신호에 따라 회로가 동작하게 만들 수 있습니다.
다음과 같이 구현됩니다.

이전 플립플롭을 다룰 때 알아보았듯이, 클럭과 또 다른 신호를 게이트로 묶는 것은 타이밍 문제를 야기할 수 있습니다.
따라서 클럭 인에이블(CE)를 가진 플립플롭이 사용 가능하다면, 로드를 클럭 인에이블에 연결하여 사용합니다.
즉 다음과 같습니다.

위는 비동기 클리어 신호 ClrN을 가지고 있으며, 이 값이 0일 때, 모든 4개의 플립플롭의 출력은 0이 됩니다.
Load가 1일 때, 클럭 인에이블이 활성화되며, D입력에 들어온 데이터는 각각 플립플롭의 마스터 래치에 보관되어 있다가 활성 에지 이후(위의 경우 하강에지)에 출력 Q로 로드됩니다.
Load가 0인 경우, 클럭 인에이블이 비활성화되며, 레지스터는 가지고 있던 값들을 그대로 유지합니다.
Shift Register
쉬프트 레지스터는 2진 데이터를 저장하여, 쉬프트 신호(Shifit)가 들어올 때 클럭에지에 맞추어 데이터를 왼쪽 혹은 오른쪽으로 쉬프트(밀어내기)할 수 있는 레지스터입니다.
쉬프트된 비트는 한쪽 끝에서 그대로 잃어버릴 수도 있으나, 순환형(cyclic type)으로 쉬프트 래지스터를 만들어 그 값을 다른 한쪽 끝의 입력으로 다시 쉬프트할 수도 있습니다.
쉬프트 레지스터는 기본적으로 이를 구성하는 플립플롭들의 출력을 다음 플립플롭의 입력으로 연결하여, 즉 플립플롭들을 직렬로 연결하여 구성됩니다. (플립플롭들에 들어오는 Clock 신호는 병렬로 연결됩니다.)
예시)

위 쉬프트 레지스터는 직렬 입력(SI)과 직렬 출력(SO)을 가집니다.
Shift 신호가 1일 경우 상승에지에서 쉬프트가 발생합니다.
반대로 Shift 신호가 0일 경우에는 데이터가 쉬프트되지 않고 유지됩니다.
그리고 점선 표시와 같이 SO를 SI의 입력으로 피드백하면, 이 쉬프트 레지스터는 순환형으로 되어, 끝단돌림(end-around) 쉬프트 역할을 합니다.
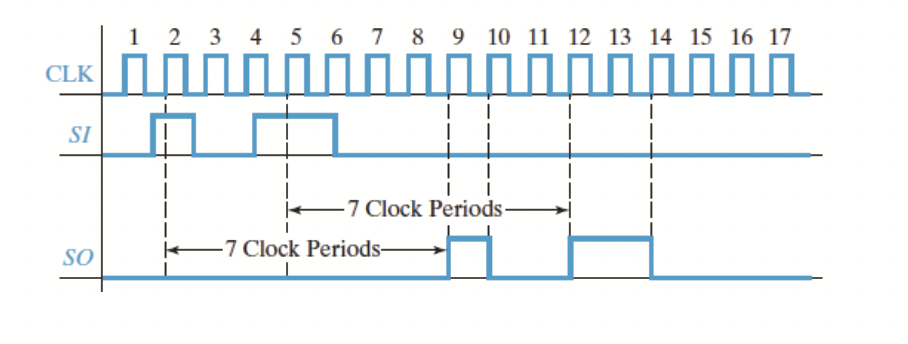
타이밍도)

쉬프트 입력은 계속 1인 상태입니다.
조금 상세하게 표현해 보았습니다.

쉬프트 레지스터의 출력($Q_0$)은 다음과 같습니다.
n개의 플립플롭으로 구성된 쉬프트 레지스터에서
현재 쉬프트 레지스터의 출력값(즉, $Q_0$의 값)은, 현재 시간을 t라 할 때, $t_n$ 에 들어온 값입니다.
위의 경우 $t_1$ 이전에 입력된, 즉 $t_0$에서 입력된 값이 $t_4$ 이후에 출력되는 것을 볼 수 있습니다.
(Serial - In, Serial - Out) Shift Register
직렬 입력(Serial in, SI)과 직렬 출력(Serial out, SO)
직렬 입력 : 데이터가 한 번에 한 비트씩 첫 번째 플릿플롭으로 쉬프트되며, 플립플롭의 입력이 병렬로는 로드될 수 없음을 의미합니다
직렬 출력 : 데이터가 오직 마지막 플립플롭에서 읽혀지고, 다른 플립플롭 출력들은 집적회로 단자에 연결되어 있지 않다는 것을 의미합니다
4개, 8개 혹은 그 이상의 플립플롭을 가진 쉬프트 레지스터들도 다음과 같이 이용할 수 있습니다.
아래는 8 비트 직렬 입력, 직렬 출력 쉬프트 레지스터입니다.

타이밍도)
Universal Shift Register 혹은 (Parallel - in, Parallel - out) Shift Register
(병렬 입력, 병렬 출력 쉬프트 레지스터)
병렬 입력(Parallel in, SI)과 병렬 출력(Parallel out, SO)
병렬 입력 : 모든 비트들이 동시에 로드될 수 있음을 의미합니다
병렬 출력 : 모든 비트들이 동시에 읽혀질 수 있음을 의미합니다
Universal Shift Register는 병렬 입력과 직렬 입력을 모두 가질 수 있습니다.
다음과 같이 MUX와 D 플립플롭을 사용하여 구현될 수 있습니다.

Shift 신호가 꺼져있고 L도 꺼져있다면, 즉 Sh = 0, L=0 인 경우, 현재의 출력값은 저장(유지)됩니다.
Shift 신호가 꺼져있고 L이 켜져있다면, 즉 Sh = 0, L=1 인 경우, 병렬 데이터 입력(D3, D2, D1, D0)의 값이 클럭(CLK)의 활성에지 직후 레지스터에 로드(저장)됩니다.
이 경우에 클럭 입력에 반전이 있으므로, 활성에지는 하강에지입니다.
Shift 신호가 켜져있다면, 즉 Sh = 1인 경우 L에 상관없이 클럭의 활성에지에서 무조건 직렬 입력(SI)가 입력(D3)으로 전달되며, 기존 저장하고 있던 값들은 우측으로 한 칸씩 Shift됩니다.
차기상태표)

이 레지스터는 병렬 데이터를 직렬 데이터로 변환하는 데 사용할 수 있습니다.
레지스터를 구성하는 마지막 플립플롭의 출력 $Q_0$ 은 병렬 출력의 하나이면서, 직렬 출력도 될 수 있습니다.

$t_0$ 때 입력된 D의 값들이, $t_1$ 에서 레지스터에 로드됩니다. 이때의 병렬 입력 데이터의 값은 1011입니다.
이때, $t_1$ 에서 레지스터의 출력($Q_0$)는 1입니다.
이후 클럭주기마다 한칸씩 Shift되기 때문에, $t_2$ 에서 레지스터의 출력은 1입니다.
$t_3 \; \to$ 0
$t_4 \;\to$ 1
즉 병렬 입력이었던 1 0 1 1이 직렬 출력 1 1 0 1로 변환되었습니다.
'🖥 Computer Science > 논리회로' 카테고리의 다른 글
| [논리회로] (12) - 카운터의 설계 (0) | 2022.05.20 |
|---|---|
| [논리회로] (11) - 카운터(Counter) (0) | 2022.05.17 |
| [논리회로] (9) - 플립플롭 (0) | 2022.05.06 |
| [논리회로] (8) - 래치 (0) | 2022.05.06 |
| [논리회로] (7) - 멀티플렉서, 디코더, 프로그래머블 논리소자 (0) | 2022.04.15 |